영상에서 추출한 프레임들의 종횡비를 고려하지 않은 채 224 x 224 로 리사이즈하여 생겼던 왜곡을 다시 원상태로 돌리고, 모델을 다시 돌려봐야하는 단계에서 Bi-LSTM + Attention 모델로 변경하는 것이 어떨지에 대한 얘기가 회의 중에 나와서 관련 논문을 읽고 비교를 해본다.
- 관련 논문과 정리 내용
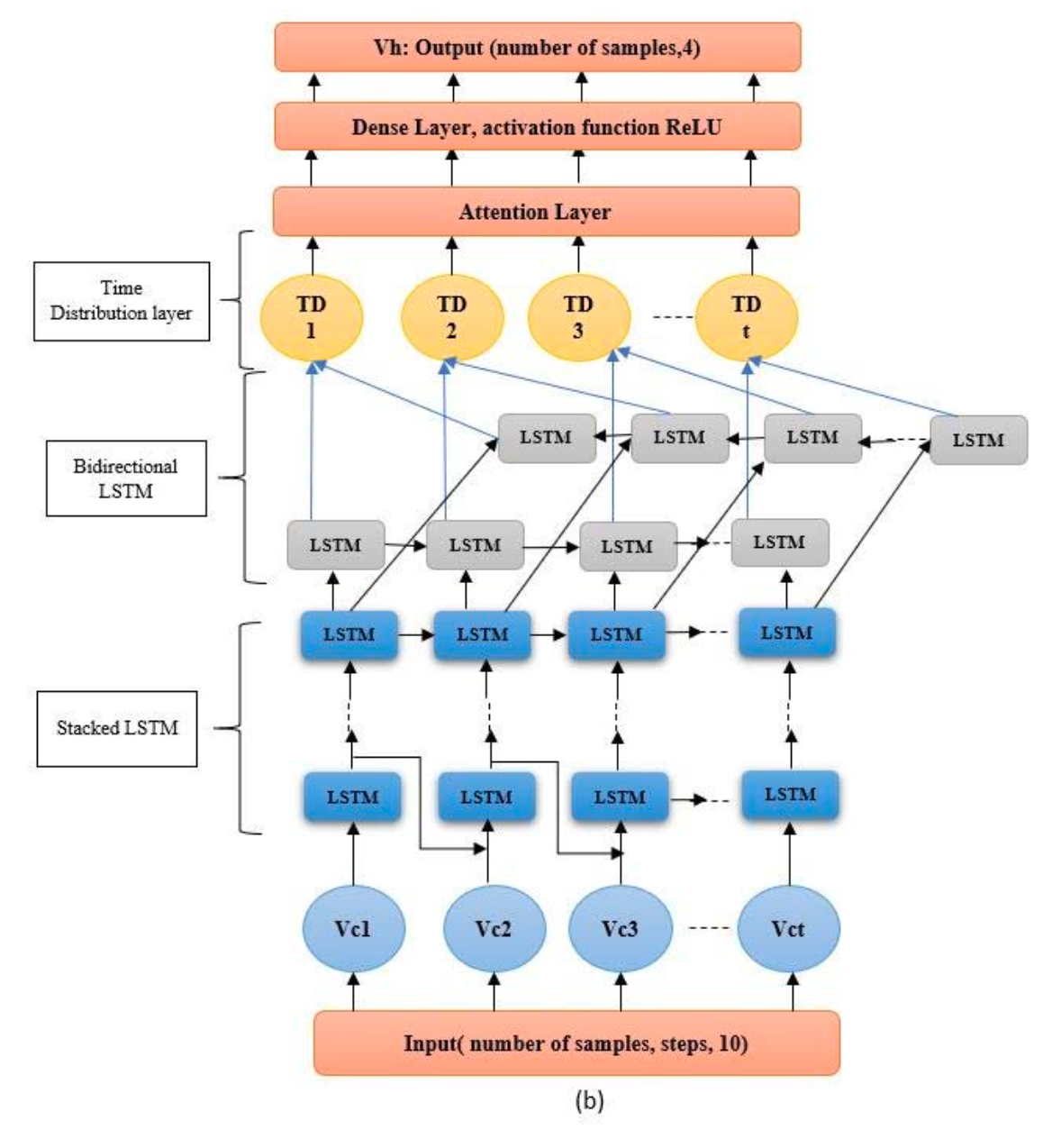
Detecting Driver Behavior Using Stacked LSTM Network With Attention Layer
목적, 마감, 결과, subtasks
Bi-LSTM 원리
💡
핵심 아이디어
Bi-LSTM은 입력 시퀀스를 두 방향(정방향, 역방향)으로 동시에 처리함으로써, 각 시점의 출력을 계산할 때 이전 정보(과거) 뿐만 아니라 이후 정보(미래)도 함께 고려함
구조
X = [x₁, x₂, x₃, x₄, x₅]Bi-LSTM은 두 개의 LSTM을 사용
- Forward LSTM (→)
- 입력 시퀀스를 정방향으로 처리
x₁ → x₂ → x₃ → x₄ → x₅- 각 시점의 출력(hidden state)
h₁^→ = LSTM_forward(x₁)
h₂^→ = LSTM_forward(x₂)
h₃^→ = LSTM_forward(x₃)
h₄^→ = LSTM_forward(x₄)
h₅^→ = LSTM_forward(x₅)- Backward LSTM (←)
- 입력 시퀀스를 역방향으로 처리
x₅ → x₄ → x₃ → x₂ → x₁- 입력은 뒤에서부터 처리되지만, 출력은 시간 순서대로 매핑
h₁^← = LSTM_backward(x₁)
h₂^← = LSTM_backward(x₂)
h₃^← = LSTM_backward(x₃)
h₄^← = LSTM_backward(x₄)
h₅^← = LSTM_backward(x₅)시간 t에서의 bi-LSTM의 은닉 상태는 다음처럼 구성됨
|| 는 벡터 결합(concatenation) 연산
| 항목 | 단일 LSTM | Bi-LSTM |
| 입력 시퀀스 | T | T |
| 출력 벡터 차원 | hidden_size | 2 x hidden_size |
| 출력 텐서 shape | (T, hidden_size) | (T, 2 x hidden_size) |
forward, backward 결과를 벡터 결합하기 때문에 출력의 수(T)는 동일하지만, 동일한 LSTM 성능을 유지하고 싶다면 hidden_size는 두 배 해야함
시각적 다이어그램
Input Sequence: x₁ x₂ x₃ ... x₁₂
Forward LSTM: h₁^→ → h₂^→ → h₃^→ ... h₁₂^→
Backward LSTM: h₁^← ← h₂^← ← h₃^← ... h₁₂^←
Final Output: h₁ = [h₁^→ ; h₁^←]
h₂ = [h₂^→ ; h₂^←]
...
h₁₂ = [h₁₂^→ ; h₁₂^←]Bi-LSTM + Attention 도입 시 기대되는 장점
| 높은 예측 정확도 | Bi-LSTM은 과거 + 미래 맥락을 모두 활용하고 Attention은 유용한 정보에 집중함으로써, 두 기법의 상호 보완적 효과로 모델 정확도가 향상 논문에서 제안된 모델은 기존 단뱡항 LSTM 대비 오류율을 크게 감소시켰으며, 이는 미래 정보를 반영한 은닉표현과 중요 입력의 강조 덕분 |
| 일반화 성능 향상 및 오버피팅 완화 | Attention 메커니즘은 불필요한 정보에 대한 가중치를 낮추고 핵심적인 입력에만 높은 가중치를 할당하기 때문에, 모델이 훈련 데이터의 잡음까지 암기하는 것을 막아줌 그 결과, 논문에서도 학습 오차와 테스트 오차의 차이가 크게 줄어들어(오버피팅 감소) 모델의 일반화 성능이 개선됨 |
| 학습 속도 향상 및 효율성 | Attention을 통해 모델이 중요한 부분에 집중하여 학습함으로써 훈련 과정이 빨라지고 수렴이 빠르게 이루어지는 장점이 있음 논문에서도, attention을 추가한 모델은 더 적은 에폭으로 동일 성능에 도달하여 연산 비용을 절감했다고 보고함 Attention 레이어가 메모리 역할을 수행하여 LSTM이 모든 정보를 일렬로 압축해야하는 부담을 줄여주기 때문 |
| 모델 해석력 향상 | Attention 가중치는 각 입력 시퀀스 요소의 중요도를 나타내므로, 어떤 요인이 운전자 행동에 영향을 주었는지를 해석할 수 있는 단서를 제공 |
LSTM 셀 구조
┌────────────┐
x_t ────▶│ │
h_{t-1}──▶│ LSTM │──▶ h_t (출력)
c_{t-1}──▶│ Cell │──▶ c_t (업데이트된 셀 상태)
└────────────┘LSTM의 셀 개수는 시퀀스 길이와 같음
- LSTM 셀 = LSTM이 하나의 시점 t를 처리하는 작은 모듈
→ bi-LSTM은 시퀀스 길이 T만큼의 forward 셀, backward 셀 각각 있으므로 시퀀스 길이의 2배만큼 셀이 있음
hidden state 크기
각 시점 t에서 LSTM이 출력하는 은닉 상태 의 벡터 차원
- 예를 들어, hidden size=64이면, 이고, 전체 시퀀스 출력은 shape이 (T, 64)가 됨 (T: 시퀀스 길이)
hidden state 는 각 시점에서 LSTM이 얼마나 풍부하게 정보를 표현하느냐 결정
- 즉, 하나의 셀이 얼마나 복잡한 특징을 기억할 수 있는지, 메모리 용량 같은 개념
결정하는 법
- 경험 기반
모델 규모 추천 hidden size 작거나 빠르게 학습하고 싶을 때 16, 32 보통 수준의 데이터 64, 128 복잡한 문제, 더 깊은 특징 표현 필요 256, 512 이상 - 문제의 복잡도 기준
- 예측해야 하는 출력이 단순하거나 데이터 양이 적다면 → 작은 크기
- 시계열 길이가 길고, 복잡한 패턴이 많다면 → 큰 크기
- 오버피팅 여부 확인
- hidden size가 너무 크면
- 훈련 데이터에 지나치게 적합(overfit)
- 학습 시간이 길어지고 성능이 불안정
- 너무 작으면
- 충분한 표현을 못 해서 underfit
검증 성능 기준으로 Grid Search 나 Validation loss를 통해 최적화
- hidden size가 너무 크면
Time Distribution layer
| TimeDistributed(Dense) | Dense | |
| 차이점 | 시퀀스의 각 시점마다 동일한 Dense를 반복 적용 | 전체 시퀀스를 1개의 벡터처럼 보고 Dense 한 번만 적용 |
| 시계열 시점 유지 | O | X |
| 입력 shape | (batch, time, features) | (batch, features) or flatten |
| 출력 shape | (batch, time, new_features) | (batch, new_features) |
꼭 attention 전에 hidden size를 줄여야할까?
| 상황 | 추천 전략 |
| LSTM hidden size가 크고 연산이 부담됨 | TimeDistributed(Dense(small_dim))로 줄이고 Attention |
| Attention layer가 dot-product 방식일 때 | 줄이는 게 매우 유리 self-attention에서 사용되는 대표적인 방식 |
| 성능이 중요하고 연산량 문제 없음 | hidden size 그대로 유지 |
| 실험 중이라면? | 둘 다 해보고 validation loss로 비교해보기 |
논문 구조 코드화
TensorFlow / Keras 버전
from tensorflow.keras.layers import Input, LSTM, Bidirectional, TimeDistributed, Dense, Attention, Layer
from tensorflow.keras.models import Model
import tensorflow as tf
class AdditiveAttentionLayer(Layer):
def __init__(self, units):
super(AdditiveAttentionLayer, self).__init__()
self.W1 = Dense(units)
self.W2 = Dense(units)
self.V = Dense(1)
def call(self, encoder_output):
# encoder_output: (batch_size, time_steps, hidden_size)
score = self.V(tf.nn.tanh(self.W1(encoder_output)))
attention_weights = tf.nn.softmax(score, axis=1)
context_vector = attention_weights * encoder_output
context_vector = tf.reduce_sum(context_vector, axis=1) # (batch_size, hidden_size)
return context_vector
# 모델 구성
input_ = Input(shape=(12, 10)) # time_steps, feature_dim
# Stacked LSTM + BiLSTM
x = LSTM(64, return_sequences=True)(input_)
x = LSTM(64, return_sequences=True)(x)
x = Bidirectional(LSTM(64, return_sequences=True))(x)
# TimeDistributed(Dense)
x = TimeDistributed(Dense(64, activation='relu'))(x)
# Additive Attention
context = AdditiveAttentionLayer(units=64)(x)
# Output
output = Dense(4, activation='linear')(context)
model = Model(inputs=input_, outputs=output)
model.summary()Pytorch
import torch
import torch.nn as nn
import torch.nn.functional as F
class AdditiveAttention(nn.Module):
def __init__(self, hidden_dim, attn_dim):
super(AdditiveAttention, self).__init__()
self.W1 = nn.Linear(hidden_dim, attn_dim)
self.V = nn.Linear(attn_dim, 1)
def forward(self, encoder_output):
# encoder_output: (batch, time_steps, hidden_dim)
score = self.V(torch.tanh(self.W1(encoder_output))) # (batch, time_steps, 1)
weights = torch.softmax(score, dim=1) # (batch, time_steps, 1)
context = torch.sum(weights * encoder_output, dim=1) # (batch, hidden_dim)
return context, weights
class BiLSTM_Attention_Model(nn.Module):
def __init__(self, input_dim=10, lstm_dim=64, attn_dim=64, output_dim=4):
super(BiLSTM_Attention_Model, self).__init__()
# num_layers = 2와 같음
self.lstm1 = nn.LSTM(input_dim, lstm_dim, batch_first=True, bidirectional=False)
self.lstm2 = nn.LSTM(lstm_dim, lstm_dim, batch_first=True, bidirectional=False)
self.bi_lstm = nn.LSTM(lstm_dim, lstm_dim, batch_first=True, bidirectional=True)
self.fc_time = nn.Linear(lstm_dim * 2, lstm_dim)
self.attn = AdditiveAttention(lstm_dim, attn_dim)
self.output_layer = nn.Linear(lstm_dim, output_dim)
def forward(self, x):
x, _ = self.lstm1(x) # (batch, seq, lstm_dim)
x, _ = self.lstm2(x) # (batch, seq, lstm_dim)
x, _ = self.bi_lstm(x) # (batch, seq, lstm_dim*2)
x = F.relu(self.fc_time(x)) # TimeDistributed(Dense) equivalent
context, weights = self.attn(x) # (batch, lstm_dim), (batch, time_steps, 1)
output = self.output_layer(context) # (batch, output_dim)
return output, weights